

728x90
반응형
출처 : https://www.youtube.com/watch?v=xlKz4HteK0U&list=PLBrGAFAIyf5rby7QylRc6JxU5lzQ9c4tN&index=44
Disk Scheduling
- Disk access 요청들의 처리 순서를 결정
- Disk system의 성능을 향상
- 평가 기준
- Throughput
- 단위 시간당 처리량
- Mean response time
- 평균 응답 시간
- Predictability
- 응답 시간의 예측성. 내가 요청을 보냈을 때, 응답을 받을 수 있는가
- 요청이 무기한 연기(starvation)되지 않도록 방지
- Throughput
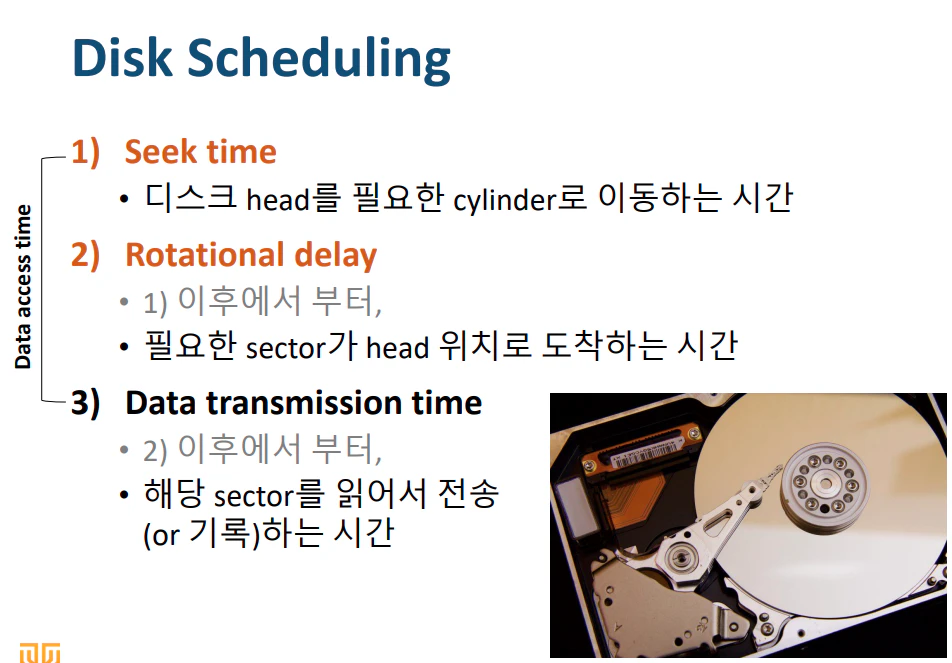
Data access time = seek time + rotational delay + data transmission time
- Seek time
- 디스크 head를 필요한 cylinder로 이동하는 시간
- Rotational delay
- seek time 이후에서부터, 필요한 sector가 head 위치로 도착하는 시간
- Data transmission time
- Rotational delay 이후에서부터, 해당 sector를 읽어서 전송(혹은 기록)하는 시간
Disk scheduling에서 성능을 높이려면 seek time과 rotational delay의 순서를 잘 결정을 해줘야한다.
Disk scheduling에서 고려해야할 것은 seek time과 rotational delay이다.
- Optimizing seek time : seek time을 최적화하는 scheduling 기법
- FCFS (First Come First Service)
- SSTF (Shortest Seek Time First)
- Scan
- C-Scan (Circular Scan)
- Look
- Optimizing rotational delay : rotational delay를 최적화하는 scheduling 기법
- Sector queuing (SLTF, Shortest Latency Time First)
- SPTF (Shortest Positioning Time First)
First Come First Service (FCFS)
- 요청이 도착한 순서에 따라 처리. 먼저 들어온 요청을 먼저 처리
- 장점
- 간단함
- Low scheduling overhead
- 공평한 처리 기법 (무한 대기 방지)
- 간단함
- 단점
- 최적 성능 달성에 대한 고려가 없음
- Disk access 부하가 적은 경우에 적합함
- Example
- 총 256개의 cylinder로 구성
- Head의 시작 위치 : 100번 cylinder
- Access request queue(들어오는 순서) : 160, 200, 90, 170, 20, 190, 120, 130 (head 번호들)
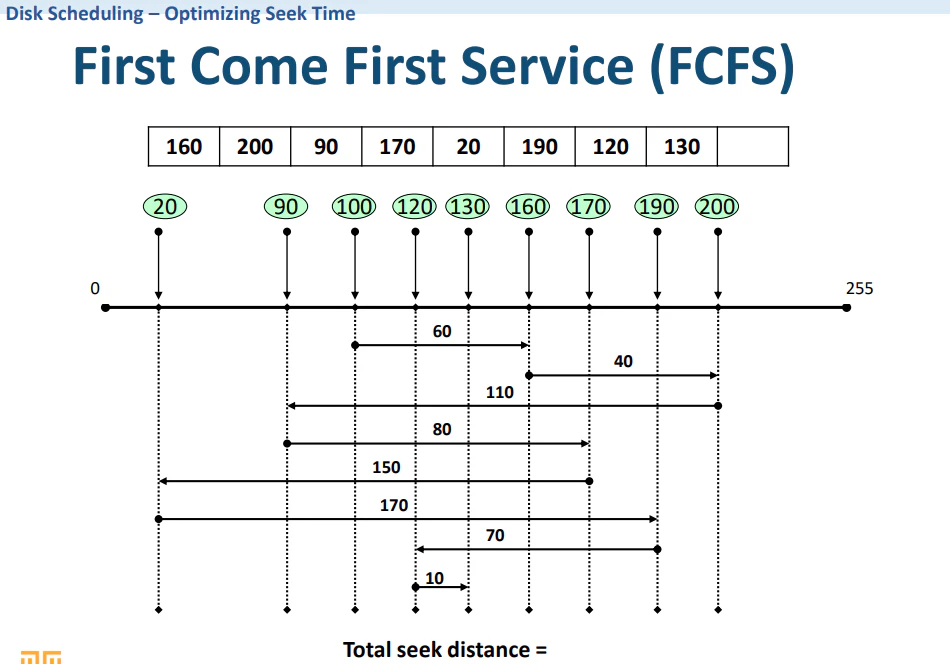
- 시작 위치는 100번 실린더에서 출발한다.
- 맨 처음 들어온 head 번호는 160번이므로 head가 160번 실린더로 이동한다. (이동거리는 60)
- 그 다음 200번 실린더로 이동한다. (이동거리 40)
- 90번 실린더로 이동한다. (이동거리 110)
- 170번 실린더로 이동한다. (이동거리 80)
- 20번 실린더로 이동한다. (이동거리 150)
- 190번 실린더로 이동한다. (이동거리 170)
- 120번 실린더로 이동한다. (이동거리 70)
- 130번 실린더로 이동한다. (이동거리 10)
- Total seek distance = 60 + 40 + 110 + 80 + 150 + 170 + 70 + 10 = 690

Shortest Seek Time First (SSTF)
- 현재 head 위치에서 가장 가까운 요청 먼저 처리 -> seek distance 감소
- 장점
- Throughput이 높음
- Mean response time 낮음
- 단점
- Predictability 낮음. 거리가 먼 요청은 언제 처리될지 알 수 없음
- 현재 head 근처에 요청이 계속 들어오면 Starvation 현상 발생 가능
- 일괄처리 시스템에 적합함
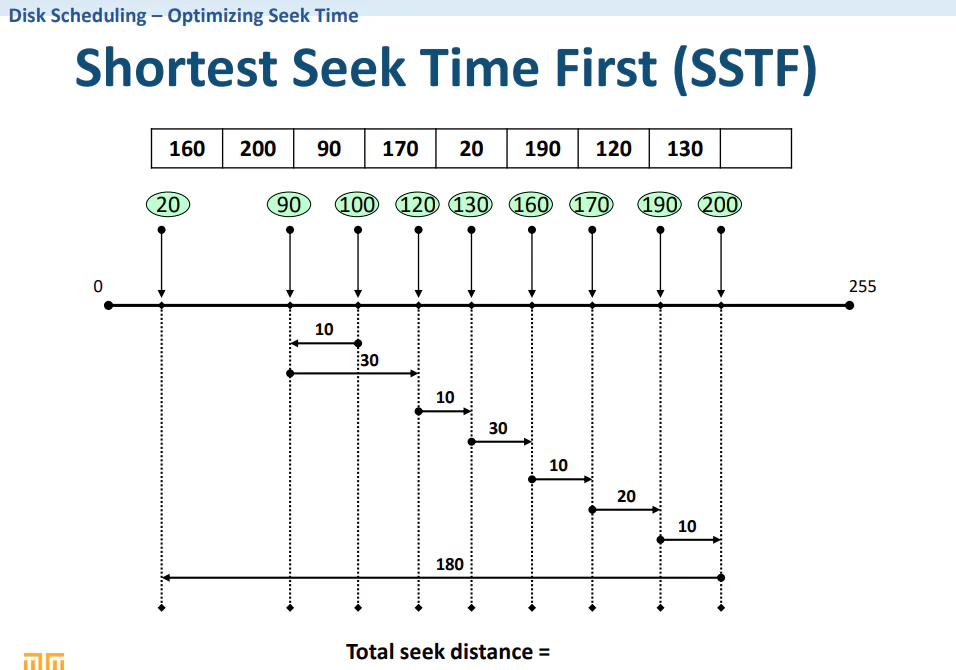
- 시작 위치는 100번 실린더에서 출발한다.
- 현재 위치(100번)에서 가장 가까운 90번 실린더로 이동한다. (이동거리 10)
- 현재 위치(90번)에서 가장 가까운 120번 실린더로 이동한다. (이동거리 30)
- 현재 위치(120번)에서 가장 가까운 130번 실린더로 이동한다. (이동거리 10)
- 현재 위치(130번)에서 가장 가까운 160번 실린더로 이동한다. (이동거리 30)
- 현재 위치(160번)에서 가장 가까운 170번 실린더로 이동한다. (이동거리 10)
- 현재 위치(170번)에서 가장 가까운 190번 실린더로 이동한다. (이동거리 20)
- 현재 위치(190번)에서 가장 가까운 200번 실린더로 이동한다. (이동거리 10)
- 남은 20번 실린더로 이동한다. (이동거리 180)
- Total seek distance = 10 + 30 + 10 + 30 + 10 + 20 + 10 + 180 = 300
- FCFS 보다 적은 total seek distance를 가짐
- 20번 실린더의 경우처럼 predictability가 낮고, starvation 문제가 발생할 수 있음
Scan Scheduling
- 현재 head의 진행 방향에서, head와 가장 가까운 요청 먼저 처리
- (진행방향 기준) 마지막 cylinder 도착 후, 반대 방향으로 진행
- 장점
- SSTF의 starvation 문제 해결
- Throughput 및 mean response time 우수
- 단점
- 진행 방향 반대쪽 끝의 요청들의 응답시간 높음
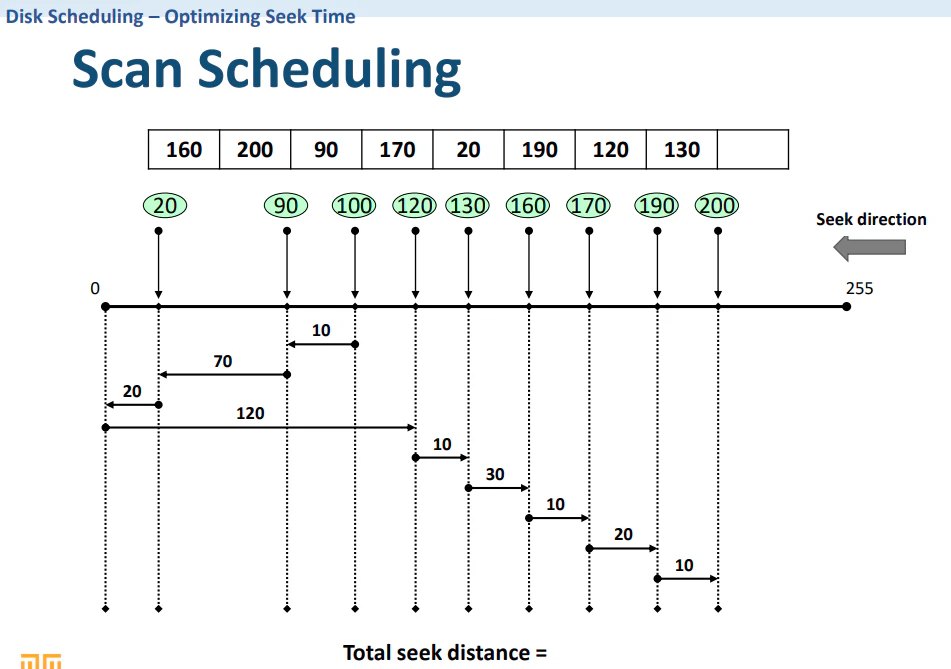
- 시작 위치는 100번 실린더에서 출발한다. 초기 진행 방향은 낮은 쪽으로 이동한다고 해보자.
- 현재 위치(100번)에서 가장 가까운 90번 실린더로 이동한다. (이동거리 10)
- 현재 위치(90번)에서 가장 가까운 20번 실린더로 이동한다. (이동거리 70)
- 현재 위치(20번)에서 끝까지 가야하므로 0번 실린더로 이동한다. (이동거리 20)
- 진행 방향을 바꿔서 현재 위치(0번)에서 가장 가까운 120번 실린더로 이동한다. (이동거리 120)
- 현재 위치(120번)에서 가장 가까운 130번 실린더로 이동한다. (이동거리 10)
- 현재 위치(130번)에서 가장 가까운 160번 실린더로 이동한다. (이동거리 30)
- 현재 위치(160번)에서 가장 가까운 170번 실린더로 이동한다. (이동거리 10)
- 현재 위치(170번)에서 가장 가까운 190번 실린더로 이동한다. (이동거리 20)
- 현재 위치(190번)에서 가장 가까운 200번 실린더로 이동한다. (이동거리 10)
- Total seek distance = 10 + 70 + 20 + 120 + 10 + 30 + 10 + 20 + 10 = 300
- SSTF 스케줄링과 마찬가지로 낮은 total seek distance를 가짐
- starvation 문제 해결
C-Scan Scheduling
- Scan과 유사
- 하지만 Scan 스케줄링의 경우 진행 방향 반대쪽 끝의 요청들의 응답시간 높다는 문제점이 존재(ex. 200번 실린더)
- Head가 미리 정해진 방향으로만 이동
- 마지막 cylinder 도착 후, 시작 cylinder로 이동 후 재시작
- 장점
- Scan 대비 균등한 기회 제공

- 시작 위치는 100번 실린더에서 출발한다. 진행 방향은 낮은 쪽으로 이동한다고 해보자.
- 현재 위치(100번)에서 가장 가까운 90번 실린더로 이동한다. (이동거리 10)
- 현재 위치(90번)에서 가장 가까운 20번 실린더로 이동한다. (이동거리 70)
- 현재 위치(20번)에서 끝까지 가야하므로 0번 실린더로 이동한다. (이동거리 20)
- 현지 위치(0번)에서 반대편 끝 실린더 번호(255번)로 이동한다. (이동거리 255) 진행 방향은 이전과 동일하다.
- 현재 위치(255번)에서 가장 가까운 200번 실린더로 이동한다. (이동거리 55)
- 현재 위치(200번)에서 가장 가까운 190번 실린더로 이동한다. (이동거리 10)
- 현재 위치(190번)에서 가장 가까운 170번 실린더로 이동한다. (이동거리 20)
- 현재 위치(170번)에서 가장 가까운 160번 실린더로 이동한다. (이동거리 10)
- 현재 위치(160번)에서 가장 가까운 130번 실린더로 이동한다. (이동거리 30)
- 현재 위치(130번)에서 가장 가까운 120번 실린더로 이동한다. (이동거리 10)
- Total seek distance = 10 + 70 + 20 + 255 + 55 + 10 + 20 + 10 + 30 + 10 = 490
- Scan 스케줄링 대비 균등한 기회 제공
- 실린더의 끝에 도달하면 반대쪽 끝으로 이동해야하는 비효율성이 존재
Look Scheduling
- Elevator algorithm라고도 부름
- Scan (C-Scan)에서 현재 진행 방향에 요청이 없으면 방향 전환
- 마지막 cylinder까지 이동하지 않음. 요청이 있던 곳까지만 이동 후 방향 전환
- Scan (C-Scan)의 실제 구현 방법
- 장점
- Scan의 불필요한 head 이동 제거
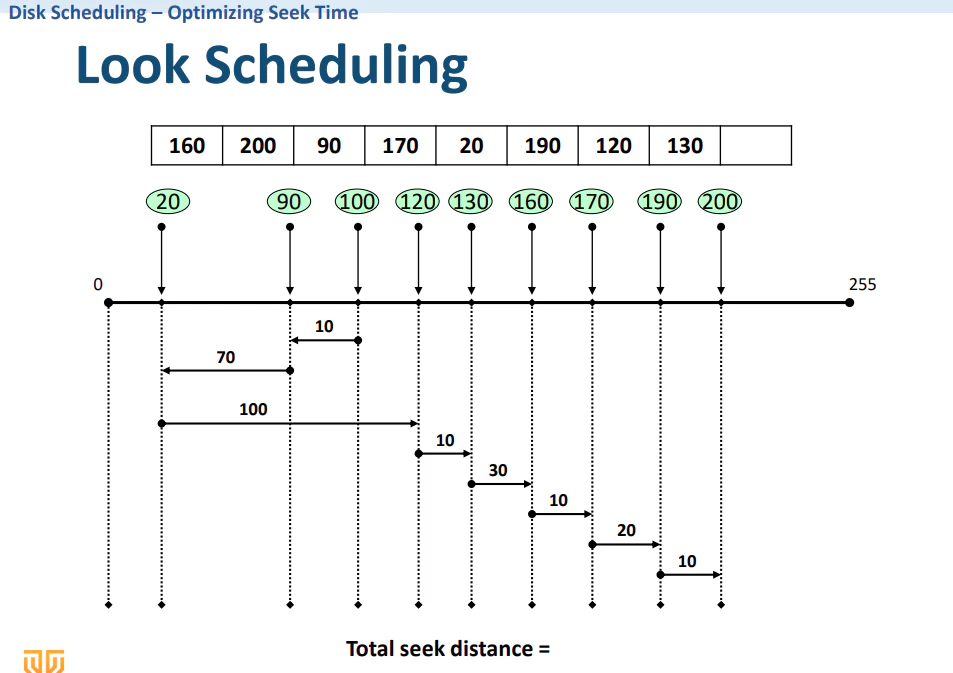
- 시작 위치는 100번 실린더에서 출발한다. 진행 방향은 낮은 쪽으로 이동한다고 해보자.
- 현재 위치(100번)에서 가장 가까운 90번 실린더로 이동한다. (이동거리 10)
- 현재 위치(90번)에서 가장 가까운 20번 실린더로 이동한다. (이동거리 70)
- 방향을 전환한 후, 현재 위치(20번)에서 가장 가까운 120번 실린더로 이동한다. (이동거리 100)
- 현재 위치(120번)에서 가장 가까운 130번 실린더로 이동한다. (이동거리 10)
- 현재 위치(130번)에서 가장 가까운 160번 실린더로 이동한다. (이동거리 30)
- 현재 위치(160번)에서 가장 가까운 170번 실린더로 이동한다. (이동거리 10)
- 현재 위치(170번)에서 가장 가까운 190번 실린더로 이동한다. (이동거리 20)
- 현재 위치(190번)에서 가장 가까운 200번 실린더로 이동한다. (이동거리 10)
- Total seek distance = 10 + 70 + 100 + 10 + 30 + 10 + 20 + 10 = 260
- 실린더 끝까지 이동하지 않기 때문에 낮은 total seek distance를 가짐
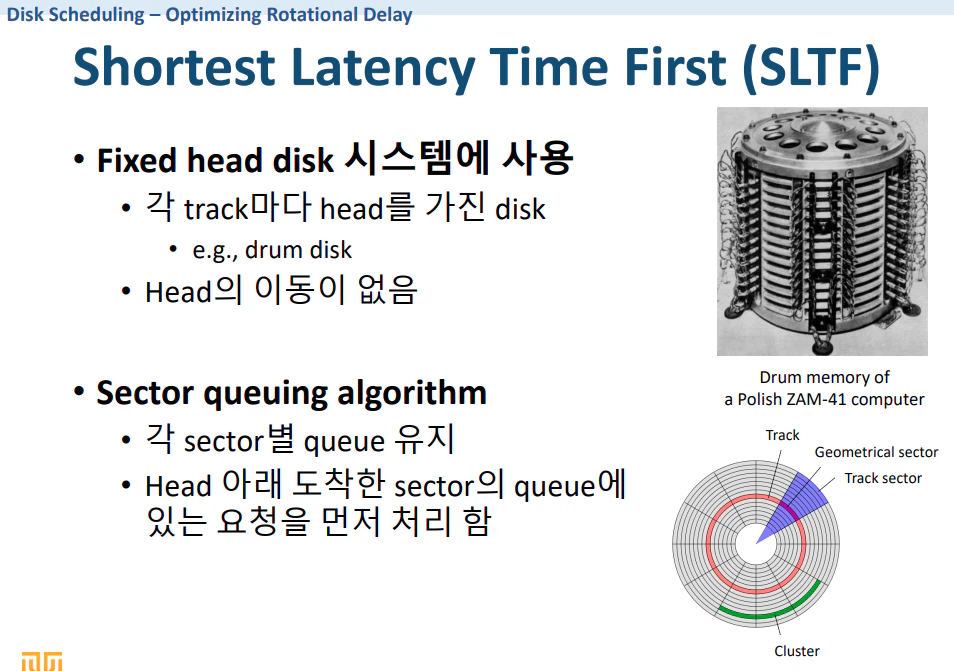
Optimizing Rotational Delay - Shortest Latency Time First (SLTF)
- disk가 돌아가는 회전 수를 최대한 줄이면서 서비스를 제공하는 스케줄링 기법
- Fixed head disk 시스템(head가 고정된 시스템)에 사용
- 각 track 마다 head를 가진 disk
- drum disk 등
- Head의 이동이 없음
- 각 track 마다 head를 가진 disk
- Sector queuing algorithm
- 각 sector 별 queue 유지
- Head 아래 도착한 sector의 queue에 있는 요청을 먼저 처리 함
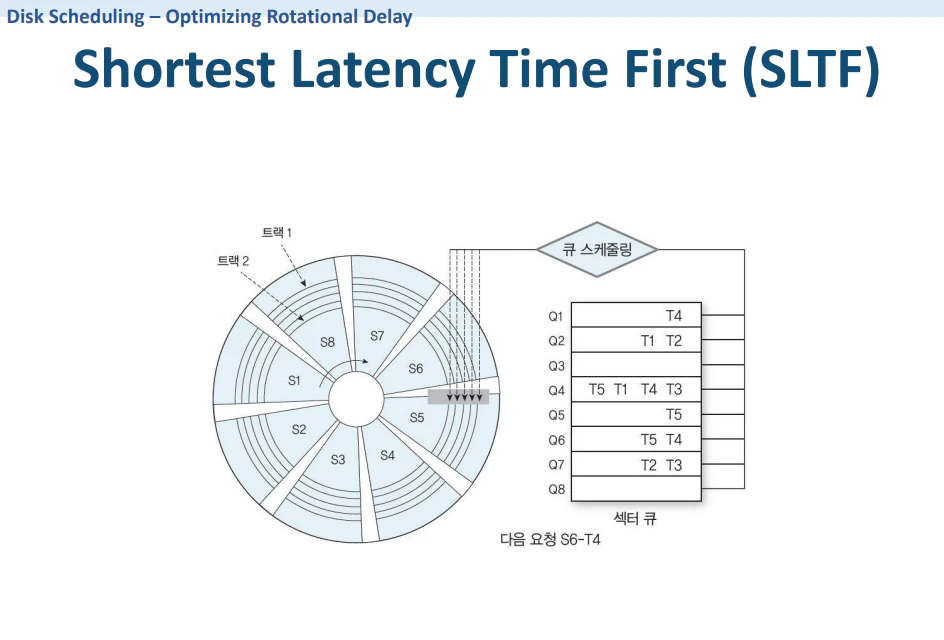
- 각 sector 마다 queue 존재 (Qn : Sn(n번 Sector)에 대한 Queue)
- Queue에 몇 번째 track을 읽어야 하는지에 대한 요청을 넣음
- 고정된 head가 특정 sector에 도착하면 해당 sector의 queue에 들어있는 요청을 모두 수행
- 해당 queue에 있던 요청을 모두 수행하면 디스크 회전
- Moving head disk의 경우
- 같은 cylinder에 여러 개의 요청 처리를 위해 사용 가능
- Head가 특정 cylinder에 도착하면, 고정 후 해당 cylinder의 요청을 모두 처리
Shortest Positioning Time First (SPTF)
- Positioning time = Seek time + rotational delay
- Positioning time이 가장 작은 요청 먼저 처리
- 장점
- Throughput 높음
- mean response time 낮음
- 단점
- 가장 안쪽과 바깥쪽 cylinder의 요청에 대해 starvation 현상 발생 가능
- Eschenbach scheduling
- Positioning time 최적화 시도
- Disk가 1회전하는 동안 요청을 처리할 수 있도록 요청을 정렬
- 한 cylinder 내 track, sector들에 대한 다수의 요청이 있는 경우, 다음 회전에 처리됨 -> 요청이 특정 구역 내에 몰려있으면 낮은 성능을 보임
728x90
반응형
'Study > 운영체제' 카테고리의 다른 글
| 운영체제 12. 입출력 시스템 & 디스크 관리 (3) - RAID Architecture (0) | 2023.12.10 |
|---|---|
| 운영체제 12. 입출력 시스템 & 디스크 관리 (1) - I/O System (1) | 2023.12.10 |
| 운영체제 11. 파일 시스템 (5) - File System Implementation (1) | 2023.12.09 |
| 운영체제 11. 파일 시스템 (4) - File Protection (0) | 2023.12.09 |
| 운영체제 11. 파일 시스템 (3) - Directory Structure (0) | 2023.12.08 |